Гирокомпас с непосредственным управлением (ГК с НУ) в принципе непригоден для быстроходных малых судов, самолетов и других объектов, испытывающих значительные вибрации и сотрясения.
Причины этого состоят в следующем:
– при высоких скоростях гирокомпас приобретает значительную скоростную девиацию, для учета которой необходимо знать скорость объекта относительно Земли (грунта) и широту места;
– движение в западном направлении с высокой скоростью вызывает уменьшение направляющего момента ГК с НУ вплоть до эффекта «остановки Земли», когда западная составляющая скорости становится равной линейной скорости земного вращения и гирокомпас полностью теряет направляющий момент.
Однако для использования он становится непригодным значительно раньше — когда уменьшающийся направляющий момент окажется того же порядка, что и возможные возмущающие моменты:
– маневрирование на высоких скоростях вызывает недопустимо большие инерционные погрешности гирокомпаса. Единственным средством борьбы с инерционными погрешностями до последнего времени считалась «настройка» гирокомпаса на частоту Шулера, т. е. превращение его в апериодический гирокомпас. Однако для такой настройки необходимо автоматическое регулирование параметров гирокомпаса в функции скорости объекта и широты места, которые известны на объекте лишь с некоторой степенью точности. Естественно, что ошибки «апериодизации» вызовут появление нескомпенсированных инерционных погрешностей гирокомпаса, которые тем больше, чем выше уровень возмущающих сил инерции. Кроме того, существовало неправильное мнение, что создание апериодического компаса путем настройки на частоту Шулера в принципе возможно лишь для невысоких скоростей;
– на высоких скоростях начинают проявляться эффекты центробежной и кориолисовой сил инерции, вызывающие дополнительные погрешности гирокомпаса;
– для устранения инерционных погрешностей путем регулирования параметров гирокомпаса считалось необходимым значительно увеличить габариты его чувствительного элемента и комплектацию вспомогательных приборов.
Такие крупногабаритные гирокомпасы действительно были созданы, но при этом встретились почти непреодолимые трудности в их балансировке и изоляции от внешних возмущений и эффектов инерции собственных масс гирокомпаса. Такие гирокомпасы непригодны для малых объектов.
Таким образом, на первый взгляд, гирокомпас не может найти применения на новых быстроходных транспортных судах (судах на подводных крыльях и на воздушной подушке), а в будущем — на подводном транспортном флоте.
Однако перечисленные выше недостатки присущи только ГК с НУ.
 Суть работы ГК с косвенным управлением (ГК с КУ) состоит в отказе от непосредственной связи гироскопа с Землей, достигаемой в обычных компасах с помощью присоединенного маятника, а также в отказе от апериодизации по Шулеру и в применении совершенно нового принципа устранения инерционных погрешностей. Это стало возможным благодаря применению в гирокомпасных системах электромагнитных (индукционных) устройств, предназначенных для управления движением гироскопа.
Суть работы ГК с косвенным управлением (ГК с КУ) состоит в отказе от непосредственной связи гироскопа с Землей, достигаемой в обычных компасах с помощью присоединенного маятника, а также в отказе от апериодизации по Шулеру и в применении совершенно нового принципа устранения инерционных погрешностей. Это стало возможным благодаря применению в гирокомпасных системах электромагнитных (индукционных) устройств, предназначенных для управления движением гироскопа.
Оказалось, что в таких гирокомпасах могут быть использованы малогабаритные элементы и миниатюрные гироскопы, легко поддающиеся балансировке и регулировке.
Сигнал индикатора горизонта через усилитель передается на обмотки электромеханических устройств, преобразующих усиленный сигнал во вращающие моменты, действующие вокруг горизонтальной и вертикальной осей чувствительного элемента. Эти моменты пропорциональны подаваемому сигналу, т. е. в конечном счете — углу наклонения чувствительного элемента относительно плоскости горизонта. Очевидно, вращающий момент вокруг горизонтальной оси играет роль момента силы тяжести гидравлического маятника обычного одногироскопного компаса. Вертикальный момент соответствует демпфирующему моменту, который в обычном одногироскопном компасе создается путем смещения центра тяжести чувствительного элемента к западу от центра инерции. Таким образом, если отвлечься от способа образования управляющих моментов, рассматриваемый гирокомпас повторяет основные черты обычного одногироскопного компаса. Следовательно, он также подвержен влиянию движения объекта и нуждается в коррекции. Однако электромеханическая система управления гироскопом открывает для этого совершенно новые возможности. Принципиальное отличие рассматриваемого прибора от обычного одногироскопного компаса заключается в том, что сигналы коррекции, зависящие от широты места, скорости и курса судна, вводятся в качестве дополнительных сигналов в те же цепи управления, которые обеспечивают связь гироскопа с Землей. Эти сигналы формируются в вычислительно-преобразующем устройстве, в которое автоматически поступает текущее значение компасного курса через датчик, а широта и скорость вводятся либо вручную, либо от соответствующих навигационных систем. Таким образом, общие моменты сообщаемые гироскопу вокруг его осей прецессии, включают как собственно управляющие моменты, так и моменты, соответствующие сигналам коррекции. Теоретически корректирующие моменты могут быть равны тем гироскопическим моментам, которые возникают при движении объекта. Это значит, что последние в принципе могут быть полностью скомпенсированы на осях прецессии гироскопа и, следовательно, гирокомпас будет работать так же, как если бы он был установлен на неподвижном основании. Правда, для этого необходимо еще изолировать индикатор горизонта от действия сил инерции, возникающих при маневрировании судна и на качке, или по крайней мере снизить влияние сил инерции до требуемых пределов.
Рассмотренная схема ГК с КУ выявляет одно существенное преимущество его перед обычным: теоретически его точность не зависит от скорости объекта, и, следовательно, такой гирокомпас пригоден для применения на быстроходных судах.
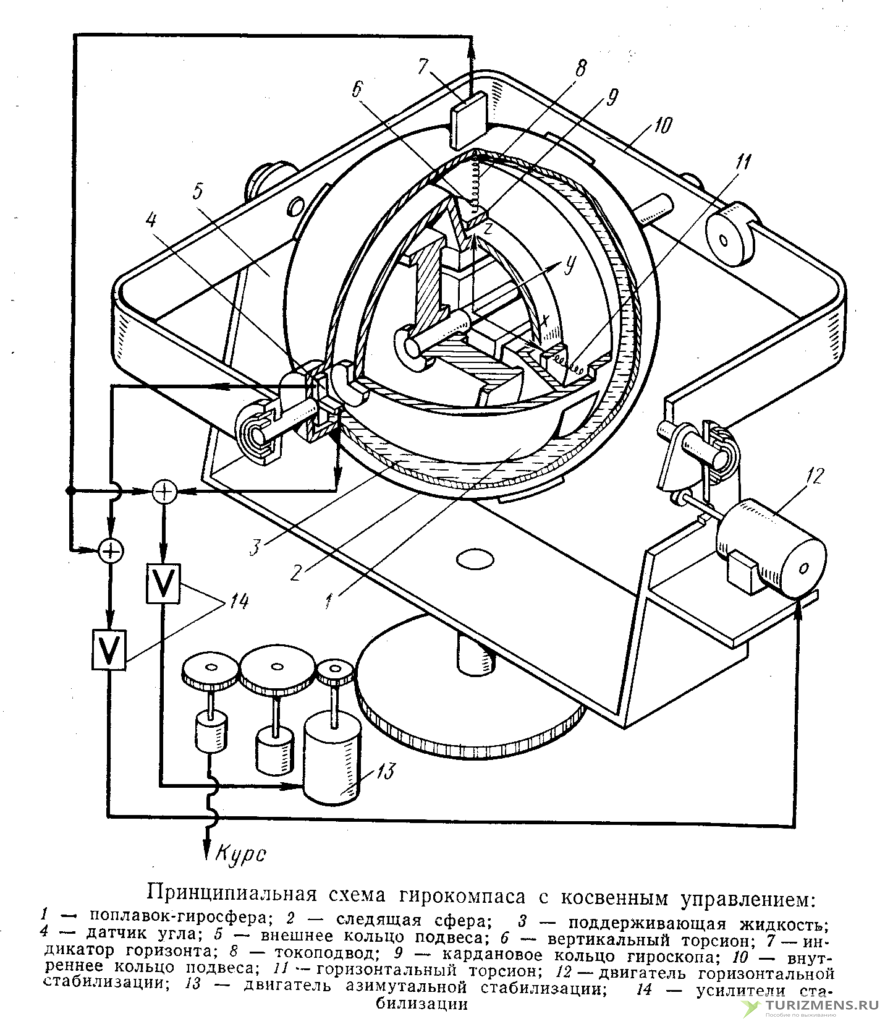
Схема иллюстрирует только принцип действия гирокомпаса с КУ, но не пригодна для практической реализации. Действительно, если применить обычный кардановый подвес чувствительного элемента, появится трудно разрешимая проблема устранения возмущающих моментов сил трения в опорах подвеса. Для изоляции гироскопа от движения основания необходимы следящие системы. Кроме того (и это главное), управляющие моменты, создаваемые на осях прецессии гироскопа, должны линейно зависеть от угла наклонения чувствительного элемента во всем диапазоне изменения этого угла. Практически с помощью индукционных датчиков момента невозможно получить линейную характеристику управляющих моментов около нулевого положения индикатора горизонта. Поэтому действительная схема гирокомпаса с электромагнитным управлением более сложная. Принципиальное устройство реальной схемы. С целью изоляции чувствительного элемента от внешних частей гирокомпаса он выполняется в виде герметичной сферы — поплавка 1 — помещенной во внешней так называемой следящей сфере. Пространство между сферами заполнено специальной жидкостью, плотность которой обеспечивает при определенной температуре нейтральную плавучесть гиросферы. Рабочая температура поддерживается автоматически системой терморегулирования.
Внутри гиросферы установлен гиромотор — высокооборотный асинхронный двигатель.
Гиросфера связана со следящей сферой двумя парами торсионов. Через торсионы на гироскоп передаются управляющие моменты, кроме того, они служат для центрирования гиросферы относительно следящей сферы. Вертикальные торсион одним концом закреплены в корпусе следящей сферы, а другим — в кардановом кольце, охватывающем гиросферу. Горизонтальные торсионы одним концом прикреплены к оболочке гиросферы, а другим — к кардановому кольцу.
Все четыре торсиона расположены в плоскостях, перпендикулярных осям собственного вращения гироскопа, и позволяют следящей сфере поворачиваться относительно гиросферы вокруг горизонтальной и вертикальной осей и вместе с оболочкой гиросферы — вокруг оси собственного вращения гироскопа.
На противоположных сторонах гиросферы по оси собственного вращения гироскопа установлены статоры индукционных съемных устройств, называемых датчиками угла. Датчики угла в разработанных конструкциях являются двухкомпонентными, т, е. реагируют на относительное рассогласование гиросферы и следящей сферы как по азимуту, так и по высоте. Питание на гиромотор и статоры датчиков угла может подаваться как по гибким спиральным токоподводам, свободно навитым вокруг торсионов, так и через сами торсионы,
Следящая сфера имеет снаружи цапфы, расположенные параллельно оси собственного вращения гироскопа. В этих цапфах она свободно подвешена на подшипниках в горизонтальном внутреннем кольце 9 стабилизированного карданова подвеса.
Горизонтальное кольцо подвешено по оси, параллельной оси горизонтальных торсионов, в вертикальном внешнем кольце подвеса, которое может поворачиваться вокруг вертикальной оси относительно корпуса прибора. Корпус своим основанием крепится к палубе.
Вертикальное кольцо приводится во вращение через зубчатую передачу двигателем азимутальной стабилизации, установленным в корпусе прибора. Это вращение передается на вертикальные торсионы, которые накладывают на гироскоп вертикальный момент. Двигатель горизонтной стабилизации через зубчатую передачу поворачивает горизонтальное кольцо вокруг его оси подвеса, закручивая горизонтальные торсионы и накладывая таким образом на гироскоп горизонтальный момент. Стабилизация следящей сферы по горизонту вокруг оси ее подвеса достигается смещением вниз центра тяжести сферы относительно оси подвеса. Двухкомпонентные индукционные датчики угла, статоры которых расположены на гиросфере, а съемные (роторные) обмотки закреплены на следящей сфере, вырабатывают напряжения, пропорциональные углам рассогласования между гиросферой и следящей сферой относительно вертикальных и горизонтальных торсионов. Датчики угла включены по дифференциальной схеме, что исключает погрешности в измерении углов рассогласования, вызываемые линейными перемещениями гиросферы относительно следящей сферы.
Сигналы рассогласования от датчиков угла через усилители, расположенные в приборе, поступают на соответствующие двигатели, с помощью которых происходит непрерывное согласование следящей сферы с гиросферой. Таким образом, при отсутствии управляющих сигналов прибор работает в режиме свободного гироскопа.
Связь гироскопа с плоскостью горизонта достигается при помощи индикатора горизонта, представляющего собой высокочувствительный физический маятник с индукционным съемом сигнала, задемпфированный вязкой жидкостью.
Из конструктивных соображений индикатор горизонта установлен на следящей сфере так, что реагирует только на отклонения следящей сферы от плоскости горизонта в направлении оси собственного вращения гироскопа. Индикатор горизонта вырабатывает напряжение, пропорциональное этому отклонению. Сигнал индикатора горизонта суммируется в противофазе с сигналами датчиков угла, и разность этих сигналов подается через усилители на соответствую-щие двигатели стабилизации.
Двигатели поворачивают следящую сферу относительно горизонтальных и вертикальных торсионов до тех пор, пока сигнал индикатора горизонта, поданный в схему суммирований в определенном масштабе, не сравняется с сигналом от соответствующего датчика угла. Горизонтальные и вертикальные торсионы окажутся закрученными на углы, пропорциональные углу отклонения главной оси гироскопа от горизонта, что обеспечивается схемой суммирования сигналов. Момент, прикладываемый вследствие этого горизонтальными торсионами к гироскопу, аналогичен маятниковому моменту обычных маятниковых гирокомпасов. Момент, прикладываемый вертикальными торсионами, аналогичен демпфирующему моменту маятниковых гирокомпасов. В результате совместного действия этих моментов гироскоп, совершая затухающие колебания, устанавливается в плоскости гироскопического меридиана. Управление чувствительным элементом через торсионы обеспечивает плавную передачу вращающих моментов, так как непосредственно чувствительному элементу сообщаются только моменты кручения торсионов, линейно зависящие от углов рассогласования гиросферы и следящей сферы.
Стабилизация следящей сферы по азимуту и высоте практически полностью изолирует гироскоп от возмущающих моментов.
Особенностью рассматриваемой схемы является возможность ее использования не только в режиме гирокомпаса, но и в режиме гироскопа направления (гироазимута). Для этого достаточно отключить управляющий сигнал по горизонтальной оси прецессии, сохранив стабилизацию относительно этой оси. Управляющий сигнал по вертикальной оси, необходимый для удержания гироскопа в плоскости горизонта, также должен быть сохранен.
Для компенсации погрешностей прибора как в режиме гирокомпаса, так и в режиме гироскопа направления служит вычислительное устройство, вырабатывающее необходимые сигналы коррекции, поступающие на двигатели стабилизации.
Величины корректирующих моментов, прикладываемых к обеим осям гироскопа в результате ввода сигналов в следящие системы, изменяются в зависимости от скорости и курса объекта, а также от широты места. Таким образом, главная ось гироскопа удерживается в направлении на север как в режиме гирокомпаса, так и в режиме гироазимута. Показания курса с прибора транслируются датчиками грубого и точного отсчета, например сельсинами, механически связанными с двигателем азимутальной стабилизации.
Для изучения прибора последовательно рассмотрим его работу на неподвижном основании, при движении с постоянной скоростью и в общем случае движения объекта.
 Принцип действия гирокомпаса
Принцип действия гирокомпаса
- I 1. ПРАВОТВОРЧЕСТВО: ПОНЯТИЕ, ПРИНЦИПЫ, ВИДЫ
- I. Взаимодействия и/или психические ситуации риска
- II. Принцип действия
- III. Для философии необходима наука, определяющая возможность, принципы и объем всех априорных знаний
- III. Психосоциальные воздействия
- III.2. Всеобщие философские методы, их специфика. Диалектика и принцип развития.
- III.Предложения по совершенствованию средств и методов противодействия занижению таможенной стоимости и иным формам недостоверного декларирования
- IV ДЕЙСТВИЯ ЛОКОМОТИВНОЙ БРИГАДЫ И ОСОБЕННОСТИ УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДА ПРИ ПЕРЕХОДЕ НА РЕЗЕРВНОЕ УПРАВЛЕНИЕ ЭЛЕКТРОННЫМ КРАНОМ МАШИНИСТА
- IV. Основные принципы жизнедеятельности средней общеобразовательной профильной школы дифференцированного обучения
- IV.2. Объект и субъект познания, изменение их взаимодействия в ходе развития познания. Исторические типы рациональности. Познание как информационный процесс: понятие отражения.
- V. Все теоретические науки, основанные на разуме, содержат априорные синтетические суждения как принципы
- V.3 Действия локомотивной бригады при формировании соединенных грузовых поездов
При наличии вращения основания двухстепенного гироскопа вокруг его оси чувствительности гироскоп начнет прецессировать таким образом, чтобы кратчайшим путем совместить вектор своего кинетического момента с вектором угловой скорости вращения основания.
Ротор гироскопа может быть подвешен не только в наружном кардановом подвесе, как это было рассмотрено выше, но и во внутреннем. При этом, как правило, используется упругий карданов подвес. Рассмотрим кинематическую схему и свойства указанного прибора, который на практике получил название динамически настраиваемого гироскопа (ДНГ).
Ротор Р3 ДНГ, устанавливается в упругом внутреннем кардановом подвесе, включающем в себя два кольца Р1 и Р2, связанных с ним с помощью четырех торсионов Т1 – Т4, имеющих высокую жесткость при изгибе и определенную, заранее заданную жесткость при закручивании. Благодаря торсионам ротор может поворачиваться на ограниченные углы вокруг осей оу’ и oz’. Кольца подвеса в нерабочем состоянии располагаются практически в одной плоскости.
Ротор совместно с системой его подвеса приводится во вращение с угловой скоростью ? с помощью внешнего двигателя, связанного с валом В, ось которого совпадает с осью ох.
 В процессе работы гироскопа на его ротор со стороны системы подвеса будут действовать моменты сил упругости и динамические моменты центробежных сил, возникающие из-за неравенства главных экваториальных моментов инерции рамок подвеса. При этом направления векторов этих моментов будет взаимно противоположными. Значение первого момента определяется жесткостью торсионов, отклонением ротора и колец его подвеса от стационарного положения и не зависит от скорости вращения ротора. В то же время, величина второго момента зависит как от отклонения ротора и колец его подвеса от стационарного положения, так и то скорости вращения ротора. Таким образом, появляется возможность подобрать скорость вращения ротора таким образом, чтобы оба рассматриваемых момента по модулю были равны друг другу. В этих условиях при отклонении ротора от стационарного положения на небольшие углы он не будет «чувствовать» системы подвеса и его свойства будут соответствовать свойствам классического гироскопа с тремя степенями свободы. Процесс подбора указанной скорости называют динамической настройкой гироскопа, а сам гироскоп – динамически настраиваемым.
В процессе работы гироскопа на его ротор со стороны системы подвеса будут действовать моменты сил упругости и динамические моменты центробежных сил, возникающие из-за неравенства главных экваториальных моментов инерции рамок подвеса. При этом направления векторов этих моментов будет взаимно противоположными. Значение первого момента определяется жесткостью торсионов, отклонением ротора и колец его подвеса от стационарного положения и не зависит от скорости вращения ротора. В то же время, величина второго момента зависит как от отклонения ротора и колец его подвеса от стационарного положения, так и то скорости вращения ротора. Таким образом, появляется возможность подобрать скорость вращения ротора таким образом, чтобы оба рассматриваемых момента по модулю были равны друг другу. В этих условиях при отклонении ротора от стационарного положения на небольшие углы он не будет «чувствовать» системы подвеса и его свойства будут соответствовать свойствам классического гироскопа с тремя степенями свободы. Процесс подбора указанной скорости называют динамической настройкой гироскопа, а сам гироскоп – динамически настраиваемым.
Наряду с описанными моделями, имеются другие варианты подвеса ротора гироскопа. Среди них наибольшее распространение в получил гидростатический подвес, особенности которого будут рассмотрены ниже.
 Любой гирокомпас (ГК), исключая не рассматриваемые в данной работе аналитические модели, построены на базе чувствительного элемента (ЧЭ), способного самостоятельно или под влиянием управляющих моментов, приложенных извне, устанавливаться в меридиан. При этом должна быть организована такая система его подвеса, чтобы движение судна оказывало минимальное влияние как на процесс установления его в меридиан, так и на то положение, которое он занимает по завершению переходного процесса. Это возможно лишь в том случае, если в основу ЧЭ положен гироскоп с тремя степенями свободы. Однако, как уже было отмечено выше, свободный гироскоп сохраняет свою ось неизменно ориентированной в пространстве и без дополнительных на него воздействий не способен устанавливаться в меридиан. В этих условиях необходимо создать такую систему коррекции гироскопа, которая решала бы стоящую задачу, но минимизировала бы влияние на его работу движения судна. Простейшим образом эта задача решается путем смещения центра массы чувствительного элемента прибора вдоль наружной оси его подвеса. Рассмотрим закон движения главной оси гироскопа при наличии указанного смещения.
Любой гирокомпас (ГК), исключая не рассматриваемые в данной работе аналитические модели, построены на базе чувствительного элемента (ЧЭ), способного самостоятельно или под влиянием управляющих моментов, приложенных извне, устанавливаться в меридиан. При этом должна быть организована такая система его подвеса, чтобы движение судна оказывало минимальное влияние как на процесс установления его в меридиан, так и на то положение, которое он занимает по завершению переходного процесса. Это возможно лишь в том случае, если в основу ЧЭ положен гироскоп с тремя степенями свободы. Однако, как уже было отмечено выше, свободный гироскоп сохраняет свою ось неизменно ориентированной в пространстве и без дополнительных на него воздействий не способен устанавливаться в меридиан. В этих условиях необходимо создать такую систему коррекции гироскопа, которая решала бы стоящую задачу, но минимизировала бы влияние на его работу движения судна. Простейшим образом эта задача решается путем смещения центра массы чувствительного элемента прибора вдоль наружной оси его подвеса. Рассмотрим закон движения главной оси гироскопа при наличии указанного смещения.
Начальная ориентация гироскопа относительно земной поверхности не будет оставаться неизменной. С течением времени вследствие суточного вращения Земли место установки гироскопа будет перемещаться в пространстве. Если за вращением Земли наблюдать извне со стороны северного полюса, будет видно, что это перемещение совершается против часовой стрелки. Таким образом, по прошествии некоторого времени место установки гироскопа, совершив вместе с Землей поворот вокруг ее оси, переместится в пространстве на некоторый угол и займет новое положение, обозначенное на схеме точкой б.
В процессе описываемого перемещения гироскоп, стремящийся сохранить направление своей главной оси неизменным в пространстве, начнет приобретать все увеличивающийся наклон к горизонту. При этом восточный конец главной оси ОА будет непрерывно подниматься над горизонтом, а западный — опускаться. Вместе с гироскопом вокруг оси 0В будет поворачиваться и груз Q. При наличии угла ? между главной осью и плоскостью горизонта вектор G уже не будет проходить через точку О подвеса гироскопа, обусловливая тем самым возникновение момента MВ, действующего на гироскоп относительно его внутренней оси подвеса ОВ. Нетрудно заметить, что величина момента MВ определяется произведением , которое вследствие малости угла ? может быть принято равным Gl? и, следовательно, считаться пропорциональной углу ?. Направление вектора момента MВ совпадает с положительным направлением оси 0В, т.е. будет перпендикулярно плоскости чертежа и указывать на читателя.
Как только момент МВ начнет действовать на гироскоп, возникнет прецессионное движение вокруг наружной оси ОС. В результате главная ось ОА гироскопа, поворачиваясь вокруг оси ОС с угловой скоростью , начнет приближаться к плоскости географического меридиана. При этом вектор кинетического момента Н гироскопа будет двигаться в направлении к северному географическому полюсу, как это показано на схеме в положении в. Как видим, описанный гироскоп приобретает способность устанавливаться в меридиан и, тем самым, превращается в компас с маятниковой коррекцией. Нередко его называют гирокомпасом с непосредственной коррекцией или гирокомпасом с автономным ЧЭ. Поскольку, стремясь к меридиану, гироскоп одновременно движется по двум углам ? и ?, совершая незатухающие колебания, фаза которых сдвинута на 90 0 [3], траектория движения его главной оси на картинной плоскости ?о? (рис. 1.6) будет эллиптической со смещенной на некоторые угол ? относительно линии горизонта его большой осью. Указанное смещение обеспечивает прецессию гироскопа вокруг местной вертикали с угловой скоростью, равной вертикальной составляющей угловой скорости вращения Земли, благодаря чему ЧЭ отслеживает ее вращение, сохраняя центр колебания главной оси (точку D) в плоскости меридиана.
Из сказанного следует, что благодаря наличию у чувствительного элемента маятниковости из-за вращения Земли возникает внешний момент, действующий относительно внутренней оси ОВ гироскопа, пропорциональный углу отклонения его главной оси ОА от плоскости горизонта.
Этот момент порождает незатухающие колебания его главной оси относительно плоскостей горизонта и меридиана, период которых достаточно длительный и составляет десятки минут.
Вполне очевидно, что характер движения ЧЭ не будет зависеть от того, какими факторами порождается указанный момент. Это дает возможность формировать его любыми другими способами.
Не менее очевидно, что для создания полноценного ГК незатухающие колебания ЧЭ тем или иным способом должны быть погашены, что практически обеспечит совмещение его главной оси ЧЭ с плоскостью меридиана и горизонта.
 Подводя итог сказанному, отметим, что для построения морского ГК следует:
Подводя итог сказанному, отметим, что для построения морского ГК следует:
§ взять за основу гироскоп с тремя степенями свободы;
§ снабдить его устройством, создающим относительно внутренней оси подвеса ротора момент, пропорциональный углу отклонения главной оси гироскопа от плоскости горизонта;
§ снабдить прибор устройством, демпфирующим прецессионные колебания гироскопа, возникающие в процессе его установления в меридиан.
”